Today, we embark on an exploration of the stability problem, a pivotal and essential aspect in the realm of control system design. Adjustments in controller parameters, fundamental to any design process, must invariably adhere to the domain of stability. Fulfilling stability conditions is not just a requirement, but a cornerstone of successful system design. To grasp this complex topic, we will first tap into our intuitive understanding of stability. This foundational knowledge will then serve as a springboard for delving into more quantitative and analytical methods. Let’s embark on this journey to demystify the principles of stability in control systems.
Understanding a Linear System
Consider a linear system, which for our purposes can be any physical system. This system is influenced by its environment, which includes:
- Command signal or reference input, as per your demand (denoted as $ r $)
- Disturbance (denoted as $ w $)
- Output (denoted as $ y $), the variable of interest
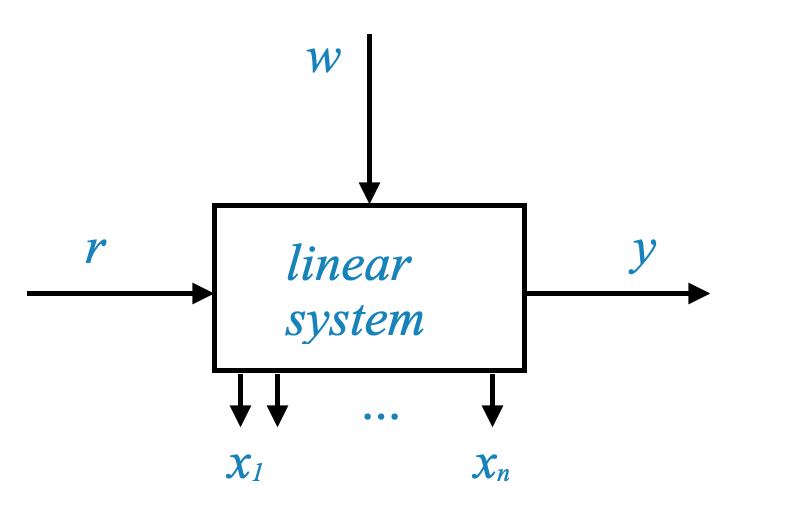
In control system analysis and design, these three variables are frequently encountered in block diagrams.
However, the output alone doesn’t describe the dynamical state of the system completely. The dynamical state is fully described by all the state variables, typically denoted as $ x_1, x_2, , x_n $.
System Model and Its Limitations
When a system is characterized by a transfer function $ G(s) $, where $ = G(s) $, achieving a desired output $ Y $ in response to an input $ R(s) $ does not automatically imply that the actual system will mirror this response. This discrepancy arises because certain state variables, which are not reflected in the output $ Y $, might exhibit instability when stimulated by the input or disturbances. These variables may fail to settle into a steady state.
Consequently, even if the model forecasts a suitable output $ Y $, the real-world system might deviate from these predictions due to unstable states. This underscores the critical importance of conducting a thorough stability analysis prior to simulations or practical experiments. It is crucial that all state variables stabilize at a steady state to affirm the overall stability of the system.
In scenarios where the primary focus is on the output, one might not prioritize controlling the transient dynamics of the state variables. However, it is vital to ensure their stability — that is, their convergence to a steady state. Thus, while the transient behavior of $ Y $ may be the main concern, verifying the stability of the state variables is a non-negotiable aspect of the system’s analysis.
In the rest of the notebook, we will focus on studying \(G(s)\), and hence we will focus on the transient behaviour of \(Y\). This assumes that the system is stable, i.e., all the state variables will always converge to a steady state.
Understanding the Role of Disturbances (\(w\)) and Initial Conditions (\(x_0\))
Change in disturbance $ w $ effectively changes the initial conditions of the system, thus altering the energy storage. By varying the initial conditions across the state space and observing the stability of $ x_1, x_2, , x_n $, we can assess the system’s stability.
- Influence of Disturbances (\(w\)):
- In real-world scenarios, disturbances (\(w\)) are often unpredictable both in their occurrence and magnitude.
- These disturbances impact the energy storage within the system. This effect is akin to altering the system’s initial conditions (\(x_0\)).
- The initial conditions at time \(t = 0\) serve as indicators of the system’s energy state at that moment.
- Initial Conditions and System Response:
- The system’s response to inputs (\(r\)) or disturbances (\(w\)) is equivalent to a change in its initial energy state.
- Modifying the initial conditions (\(x_0\)) and observing the system’s response allows us to understand how disturbances might affect the system’s stability.
- By varying the initial conditions (\(x_0\)) across a wide range in the state space, we can simulate how the system might behave under different scenarios.
- This process involves examining the stability of the state variables (\(x_1, x_2, ..., x_n\)) under these varied conditions.
- If the state variables remain stable (i.e., they do not diverge) across this range of initial conditions, we can be confident in the system’s overall stability.
In summary, the concept of stability in control systems is not just about observing the system’s output but involves a comprehensive analysis of how the state variables react to changes in initial conditions and external disturbances. By thoroughly examining the stability of these variables, we can predict and ensure the reliable performance of the system in real-world conditions.
Stability Analysis Methodology
Bounded-Input Bounded-Output (BIBO) Stability: This concept ensures that if the input $ r $ is bounded, the output $ y $ will also be bounded.
Zero-Input Stability: This aspect focuses on the system’s behavior in the absence of an external input, relying only on the initial conditions and disturbances.
It’s crucial to operate within the linear range of the system for these stability concepts to be valid. In non-linear ranges, the stability analysis becomes more complex and is beyond the scope of our current discussion.
BIBO Stability
BIBO stability is a critical concept in the study of control systems, especially for linear time-invariant systems.
In BIBO stability, we consider a system that is initially relaxed, which means that at time $ t = 0 $, all state variables $ x $ are at zero (unexcited), and the system has no initial energy stored.
\[
\textbf{x}(t=0)=\textbf{0}
\]
This scenario provides a reference point for analyzing how the system responds to external inputs.
Note that \(t=0\) is a reference time, for Linear Time Invariant (LTI) systems is your initial time. The stability analysis for time variant and/or non-linear systems is more complex and beyond the scope of this course.
This assumption simplifies the stability analysis as we can focus on the transfer function model to analyze stability.
For a relaxed system, the initial energy is zero and this means that all state variables are not excited and we can safely neglect them. Since all initial conditions are zeros we can study the stability only in terms of its transfer function (which completely characterise relaxed systems).
The key principle here is that if the external input $ r $ is bounded, then the output $ y $ should also remain bounded.
Quantitative Analysis of BIBO Stability
The quantitative method to establish BIBO stability involves ensuring that the output $ y $ remains bounded for any bounded input $ r $.
This principle applies regardless of the nature of the input, whether it’s a desired command input or a disturbance from the environment.
The boundedness of the output is a fundamental requirement for a control system to be considered stable under BIBO criteria.
In BIBO stability, we focus on the response of the system to external inputs (command and disturbance) while assuming zero initial energy.
The stability can be analyzed using the transfer function model, as a relaxed system can be fully described by this model.
The aim is to ensure that for any bounded input $ r $, the output $ y $ remains bounded.
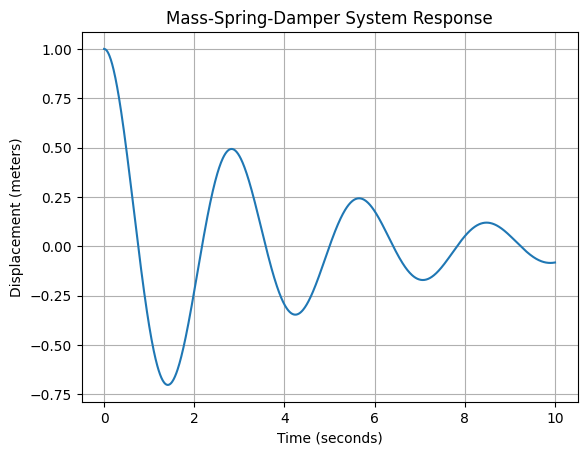
Example for BIBO Stability
- Consider a system with a step input. If the step input is bounded, the output response of the system should also exhibit bounded behavior, not growing indefinitely.