Oggi ci imbarchiamo in un’esplorazione del problema della stabilità, un aspetto fondamentale ed essenziale nel campo della progettazione dei sistemi di controllo. Le modifiche ai parametri del controller, fondamentali per qualsiasi processo di progettazione, devono invariabilmente aderire al dominio di stabilità. Il rispetto delle condizioni di stabilità non è solo un requisito, ma una pietra angolare per una progettazione di sistema di successo. Per comprendere questo argomento complesso, attingeremo prima alla nostra comprensione intuitiva della stabilità. Questa conoscenza fondamentale servirà quindi come trampolino di lancio per approfondire metodi più quantitativi e analitici. Intraprendiamo questo viaggio per demistificare i principi di stabilità nei sistemi di controllo.
Comprendere un sistema lineare
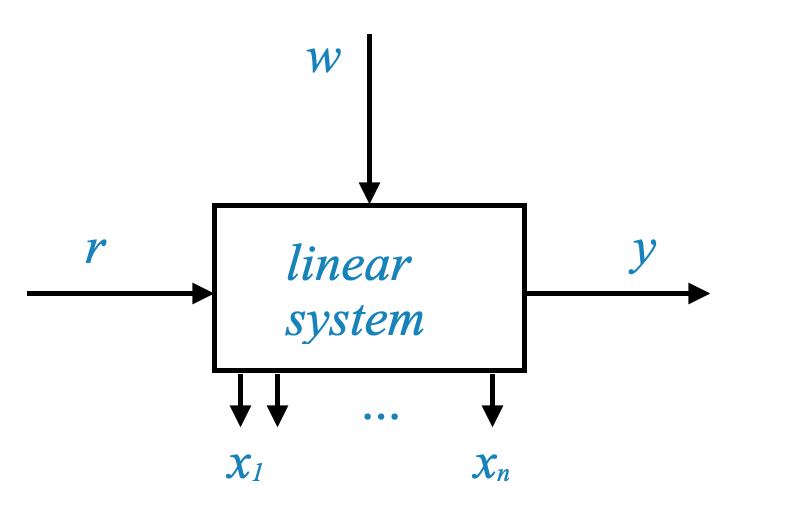
Consideriamo un sistema lineare, che per i nostri scopi può essere qualsiasi sistema fisico. Questo sistema è influenzato dal suo ambiente, che include:
Segnale di comando o ingresso di riferimento, secondo la vostra richiesta (indicato come $ r $)
Disturbo (indicato come $ w $)
Output (indicato come $ y $), la variabile di interesse
Nell’analisi e nella progettazione dei sistemi di controllo, queste tre variabili si incontrano frequentemente nei diagrammi a blocchi.
Tuttavia, l’output da solo non descrive completamente lo stato dinamico del sistema. Lo stato dinamico è completamente descritto da tutte le variabili di stato, tipicamente indicate come $ x_1, x_2, , x_n $.
Modello di sistema e suoi limiti
Quando un sistema è caratterizzato da una funzione di trasferimento $ G(s) $, dove $ = G(s) $, ottenendo l’output desiderato $ Y $ in risposta ad un input $ R(s) $ non implica automaticamente che il sistema reale rispecchierà questa risposta. Questa discrepanza nasce perché alcune variabili di stato, che non si riflettono nell’output $ Y $, potrebbero mostrare instabilità se stimolate dall’input o dai disturbi. Queste variabili potrebbero non riuscire a stabilizzarsi in uno stato stazionario.
Di conseguenza, anche se il modello prevede un output adeguato $ Y $, il sistema reale potrebbe discostarsi da queste previsioni a causa di stati instabili. Ciò sottolinea l’importanza fondamentale di condurre un’analisi approfondita della stabilità prima di simulazioni o esperimenti pratici. È fondamentale che tutte le variabili di stato si stabilizzino su uno stato stazionario per affermare la stabilità complessiva del sistema.
Negli scenari in cui l’attenzione principale è rivolta all’output, si potrebbe non dare priorità al controllo delle dinamiche transitorie delle variabili di stato. Tuttavia, è fondamentale garantire la loro stabilità, ovvero la loro convergenza verso uno stato stazionario. Pertanto, mentre il comportamento transitorio di $ Y $ può essere la preoccupazione principale, la verifica della stabilità delle variabili di stato è un aspetto non negoziabile dell’analisi del sistema.
Nel resto del quaderno ci concentreremo sullo studio di \(G(s)\), e quindi ci concentreremo sul comportamento transitorio di \(Y\). Ciò presuppone che il sistema sia stabile, cioè che tutte le variabili di stato convergano sempre ad uno stato stazionario.
Comprendere il ruolo dei disturbi (\(w\)) e le condizioni iniziali (\(x_0\))
Il cambiamento del disturbo $ w $ modifica effettivamente le condizioni iniziali del sistema, alterando così l’accumulo di energia. Variando le condizioni iniziali nello spazio degli stati e osservando la stabilità di $ x_1, x_2, , x_n $, possiamo valutare la stabilità del sistema.
Influenza dei disturbi (\(w\)):
Negli scenari del mondo reale, i disturbi (\(w\)) sono spesso imprevedibili sia nella loro occorrenza che nella loro entità.
Questi disturbi influiscono sull’accumulo di energia all’interno del sistema. Questo effetto è simile all’alterazione delle condizioni iniziali del sistema (\(x_0\)).
Le condizioni iniziali al tempo \(t = 0\) servono come indicatori dello stato energetico del sistema in quel momento.
Condizioni iniziali e risposta del sistema:
La risposta del sistema agli input (\(r\)) o ai disturbi (\(w\)) equivale ad un cambiamento del suo stato energetico iniziale.
Modificare le condizioni iniziali (\(x_0\)) e osservare la risposta del sistema permette di capire come i disturbi potrebbero influenzare la stabilità del sistema.
Variando le condizioni iniziali (\(x_0\)) in un ampio intervallo nello spazio degli stati, possiamo simulare come il sistema potrebbe comportarsi in diversi scenari.
Questo processo prevede l’esame della stabilità delle variabili di stato (\(x_1, x_2, ..., x_n\)) in queste diverse condizioni.
Se le variabili di stato rimangono stabili (cioè non divergono) in questo intervallo di condizioni iniziali, possiamo essere fiduciosi nella stabilità complessiva del sistema.
In sintesi, il concetto di stabilità nei sistemi di controllo non riguarda solo l’osservazione dell’output del sistema ma implica un’analisi completa di come le variabili di stato reagiscono ai cambiamenti delle condizioni iniziali e ai disturbi esterni. Esaminando attentamente la stabilità di queste variabili, possiamo prevedere e garantire prestazioni affidabili del sistema in condizioni reali.
Metodologia di analisi della stabilità
Stabilità BIBO (Bounded-Input Bounded-Output): questo concetto garantisce che se l’input $ r $ è limitato, anche l’output $ y $ sarà limitato.
Stabilità zero input: questo aspetto si concentra sul comportamento del sistema in assenza di un input esterno, basandosi solo sulle condizioni e sui disturbi iniziali.
È fondamentale operare all’interno dell’intervallo lineare del sistema affinché questi concetti di stabilità siano validi. Negli intervalli non lineari, l’analisi della stabilità diventa più complessa e va oltre lo scopo della nostra discussione attuale.
BARRA LATERALE - Alcuni esempi
Capiamolo meglio con alcuni esempi.
Considereremo un sistema del secondo ordine, comune nell’ingegneria di controllo.
Nell’esempio seguente, “m” è la massa, “c” è il coefficiente di smorzamento e “k” è la costante della molla. La stabilità del sistema dipende da questi parametri. Ad esempio, un coefficiente di smorzamento basso (ad esempio, “c = 0,5”) con una determinata massa e costante di molla potrebbe mostrare una risposta poco smorzata (stabile), mentre un coefficiente di smorzamento negativo (ad esempio, “c = -0,5”) potrebbe rendere il sistema instabile.
Puoi sperimentare diversi valori di “m”, “c” e “k” per dimostrare stabilità e instabilità. Lo spostamento e la velocità iniziali (displacement_iniziale e velocità_iniziale) possono anche essere variati per mostrare come il sistema reagisce da diversi stati iniziali.
import numpy as npimport matplotlib.pyplot as pltimport control as ctldef simulate_mass_spring_damper(m, c, k, initial_displacement, initial_velocity):""" Simulates the mass-spring-damper system and plots its response. Parameters: m (float): Mass c (float): Damping coefficient k (float): Spring constant initial_displacement (float): Initial displacement initial_velocity (float): Initial velocity """# System matrices A = [[0, 1], [-k/m, -c/m]] B = [[0], [1/m]] C = [1, 0] D = [0]# Create the state-space model sys = ctl.StateSpace(A, B, C, D)# Time array t = np.linspace(0, 10, 1000)# Initial state [displacement, velocity] X0 = [initial_displacement, initial_velocity]# Simulate the system t, y = ctl.initial_response(sys, T=t, X0=X0)# Plot the response plt.figure() plt.plot(t, y) plt.title('Mass-Spring-Damper System Response') plt.xlabel('Time (seconds)') plt.ylabel('Displacement (meters)') plt.grid(True) plt.show()# Example usagesimulate_mass_spring_damper(m=1.0, c=0.5, k=5.0, initial_displacement=1.0, initial_velocity=0.0)
import numpy as npimport matplotlib.pyplot as pltfrom matplotlib.animation import FuncAnimationimport control as ctlfrom IPython.display import HTMLdef draw_pendulum(ax, l, angle, is_upright):""" Draws the pendulum on the given axes. Parameters: ax (matplotlib.axes.Axes): The axes to draw on. l (float): Length of the pendulum angle (float): Angle of the pendulum (in radians) is_upright (bool): Indicates if the pendulum is in the upright position """# Convert angle to Cartesian coordinates x = l * np.sin(angle) y = l * np.cos(angle) if is_upright else-l * np.cos(angle)# Clear previous drawing and draw the pendulum ax.clear() ax.plot([0, x], [0, y], color='blue', lw=2) ax.plot(x, y, 'o', color='red', markersize=10)# Set appropriate limits for both scenariosif is_upright: ax.set_ylim(-1.5*l, 1.5*l)else: ax.set_ylim(-1.5*l, 0) ax.set_xlim(-1.5*l, 1.5*l) ax.set_aspect('equal', adjustable='box') ax.grid(True) ax.set_title('Pendulum Animation')def simulate_pendulum(g, l, initial_angle, is_upright):""" Simulates a pendulum system and creates an animation of its response. Parameters: g (float): Acceleration due to gravity l (float): Length of the pendulum initial_angle (float): Initial angle (in radians) is_upright (bool): True for simulating the upright position, False for the downward position """# Pendulum parameters A = [[0, 1], [g/l if is_upright else-g/l, 0]] B = [[0], [1/l]] C = [1, 0] D = [0]# Create the state-space model sys = ctl.StateSpace(A, B, C, D)# Time array for simulation t = np.linspace(0, 1, 10)# Initial state [angle, angular velocity] X0 = [initial_angle, 0]# Simulate the system t, y = ctl.initial_response(sys, T=t, X0=X0)# Create figure and axes for the animation fig, ax = plt.subplots(figsize=(6, 6))# Function to update the animationdef update(frame): draw_pendulum(ax, l, y[frame], is_upright)# Create animation ani = FuncAnimation(fig, update, frames=len(t), interval=10, repeat=False) # Adjusted interval# plt.show()return ani# Example usageani = simulate_pendulum(g=9.81, l=1.0, initial_angle=0.1, is_upright=True) # Unstable (Upright)# Display the animationHTML(ani.to_jshtml())
— FINE DELLA BARRA LATERALE
Stabilità BIBO
La stabilità BIBO è un concetto critico nello studio dei sistemi di controllo, in particolare per i sistemi lineari tempo-invarianti. Nella stabilità BIBO, consideriamo un sistema inizialmente rilassato, il che significa che al tempo $ t = 0 $, tutte le variabili di stato $ x $ sono a zero e il sistema non ha energia iniziale immagazzinata. Questo scenario fornisce un punto di riferimento per analizzare come il sistema risponde agli input esterni.
Tieni presente che \(t=0\) è un orario di riferimento, per i sistemi Linear Time Invariant (LTI) è l’orario iniziale. L’analisi di stabilità per sistemi variabili nel tempo e/o non lineari è più complessa e va oltre lo scopo di questo corso.
Questa ipotesi semplifica l’analisi della stabilità poiché possiamo concentrarci sul modello della funzione di trasferimento per analizzare la stabilità. Per un sistema rilassato, l’energia iniziale è zero e questo significa che tutte le variabili di stato non sono eccitate e possiamo tranquillamente trascurarle. Poiché tutte le condizioni iniziali sono zero, possiamo studiare la stabilità solo in termini della sua funzione di trasferimento.
Il principio chiave qui è che se l’input esterno $ r $ è limitato, anche l’output $ y $ dovrebbe rimanere limitato.
Analisi quantitativa della stabilità BIBO
Il metodo quantitativo per stabilire la stabilità BIBO implica garantire che l’output $ y $ rimanga limitato per qualsiasi input limitato $ r $. Questo principio si applica indipendentemente dalla natura dell’input, che si tratti di un comando desiderato o di un disturbo proveniente dall’ambiente. La limitatezza dell’output è un requisito fondamentale affinché un sistema di controllo possa essere considerato stabile secondo i criteri BIBO.
Nella stabilità BIBO, ci concentriamo sulla risposta del sistema agli input esterni (comando e disturbo) assumendo zero energia iniziale.
La stabilità può essere analizzata utilizzando il modello della funzione di trasferimento, poiché un sistema rilassato può essere completamente descritto da questo modello.
L’obiettivo è garantire che per ogni input limitato $ r $, l’output $ y $ rimanga limitato.
Esempio di stabilità BIBO
Consideriamo un sistema con ingresso a gradini. Se il passo in ingresso è limitato, anche la risposta in uscita del sistema dovrebbe mostrare un comportamento limitato, non crescere indefinitamente.
Stabilità a ingresso zero
Il secondo aspetto del nostro studio sulla stabilità è la stabilità con input zero, dove si presuppone che l’input esterno sia zero.
Tuttavia, lo stato iniziale $ x_0 $ può cambiare a causa di input esterni, influenzando l’accumulo di energia nel sistema.
Il modello matematico per la stabilità a ingresso zero è rappresentato da:
\[
\dot{x} = Ax
\]
dove $ x(t = 0) = x_0 $. L’attenzione qui è se lo stato del sistema $ x(t) $ rimane limitato per tutti $ t $ quando varia $ x_0 $. Se è così, il sistema preserva la stabilità a input zero.
Riepilogo
La stabilità con input zero considera la risposta del sistema quando si presuppone che gli input esterni siano pari a zero.
L’attenzione si concentra su come le variazioni nello stato iniziale $ x_0 $ influenzano lo stato del sistema $ x(t) $ nel tempo.
L’obiettivo è garantire che gli stati del sistema rimangano vincolati per tutto il tempo $ t $ con input esterni pari a zero.
Chiamiamo un sistema invariante nel tempo in cui l’input è zero, un sistema autonomo. Questo concetto è cruciale per studiare la stabilità a input zero.
Domanda pop-up: Perché la stabilità a input zero è importante e in cosa differisce dalla stabilità BIBO?
Risposta: la stabilità a input zero si concentra sul comportamento del sistema in assenza di input esterni, enfatizzando la risposta del sistema in base al suo stato iniziale. Si differenzia dalla stabilità BIBO, che riguarda la risposta del sistema agli input limitati esterni, garantendo che l’output rimanga limitato.
Combinazione di BIBO e stabilità a input zero
Per un sistema lineare, se sono soddisfatte sia le condizioni BIBO che quelle di stabilità con input zero, si può dedurre che per qualsiasi input limitato $ r $ e $ w $, gli stati e l’output del sistema rimarranno limitati.
Stabilità BIBO e risposta all’impulso
La risposta all’impulso $ g(t) $ di un sistema fornisce una caratterizzazione completa di un sistema rilassato. L’output del sistema è dato da:
Ciò significa che per la stabilità BIBO, l’integrale del modulo della risposta all’impulso dovrebbe essere finito.
L’integrale del modulo della risposta all’impulso del sistema caratterizza la stabilità BIBO. Nello specifico, un sistema è BIBO stabile se e solo se:
\[
\int_{0}^{\infty} |g(t)| dt < \infty
\]
Questa condizione implica che l’area sotto la curva del valore assoluto della risposta all’impulso deve essere finita.
Poli, zeri e analisi delle funzioni di trasferimento
Ora traduciamo la nostra comprensione nei requisiti dei poli e degli zeri, come riflesso nel modello della funzione di trasferimento di un sistema di controllo. Consideriamo la funzione di trasferimento rappresentata come:
Le radici di questa equazione, che sono i poli della funzione di trasferimento, determinano la stabilità del sistema.
Se prendiamo l’espansione delle frazioni parziali,
Gli zeri (radici del numeratore) influenzano l’entità e la forma della risposta transitoria ma non alterano la stabilità del sistema.
I poli determinano la stabilità del sistema e il suo comportamento intrinseco.
Ad esempio, un fattore del primo ordine nella funzione di trasferimento risulta in una risposta esponenziale (crescente o decrescente), mentre un fattore del secondo ordine porta a una risposta oscillatoria (crescente o decrescente).
Analisi nel piano s
Analizziamo il piano s per capire come i poli influenzano il comportamento del sistema:
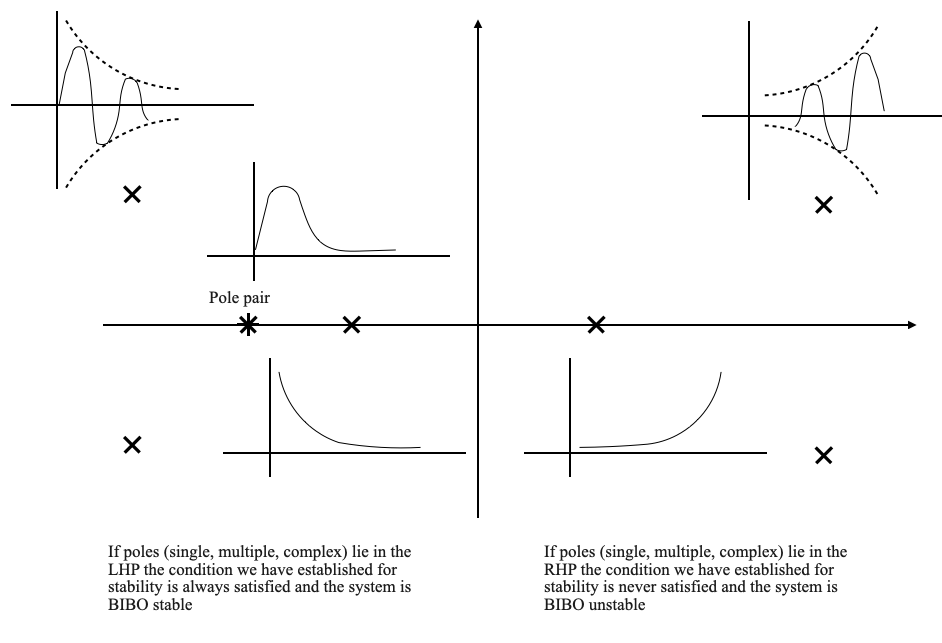
Semipiano sinistro: i poli nella metà sinistra del piano s portano ad una risposta in decomposizione, indicando un sistema stabile. Anche i poli complessi in questa regione danno luogo a risposte oscillatorie ma decadenti.
Semipiano destro: i poli nella metà destra del piano s provocano una risposta crescente, indicando un sistema instabile. Ciò vale per tutti i poli reali, complessi, ripetuti o distinti in questa regione.
Il paragrafo e il diagramma seguente mostra la risposta all’impulso (\(R(s)=1\)) per le possibili posizioni dei poli.
Poli e zeri nell’analisi delle funzioni di trasferimento
Nell’analizzare la funzione di trasferimento di un sistema, i poli e gli zeri svolgono un ruolo significativo nel determinare il comportamento del sistema. - I poli, che sono le radici dell’equazione caratteristica del sistema, determinano la stabilità del sistema. - Al contrario, gli zeri influenzano la risposta transitoria ma non influiscono sulla stabilità.
Scansione dell’s-Plane per le posizioni dei poli
Esaminando il piano s, analizziamo la posizione dei poli per determinarne la stabilità. Se un polo si trova nella metà sinistra del piano s, contribuisce al decadimento della risposta all’impulso, indicando stabilità. Al contrario, i poli nella metà destra o sull’asse immaginario possono portare all’instabilità.
Sistemi marginalmente stabili
Nei sistemi di controllo, il concetto di stabilità marginale emerge quando si ha a che fare con i poli dell’asse immaginario, in particolare i poli semplici. Analizziamo più a fondo questo scenario e comprendiamo le sue implicazioni:
Matematica e prospettiva dell’utente:
Matematicamente, i sistemi con poli sull’asse immaginario sono considerati instabili.
Tuttavia, da un punto di vista pratico, tali sistemi potrebbero ancora essere interessanti a determinate condizioni.
Analisi di una funzione di trasferimento specifica:
Questo sistema è matematicamente instabile, ma esaminiamolo dal punto di vista dell’utente.
Risposta limitata per input specifici:
Si osserva che per la maggior parte degli input $ R(s) $, ad eccezione di quelli specifici che corrispondono ai poli sull’asse immaginario, la risposta del sistema rimane limitata - in questo caso, l’input corrisponde ai poli semplici e li rende doppi.
Nel nostro caso specifico sopra, gli input critici da evitare sono $ R(s) = $ o $ R(s) = $. Ad eccezione di questi, il sistema mostra una risposta non crescente (ad esempio, risposta oscillatoria, risposta costante, ecc.).
Accettazione del Sistema in base alla Richiesta:
La decisione di accettare o rifiutare un tale sistema dipende dalla sua applicazione e dalla sua capacità di gestire le condizioni specifiche in cui la risposta rimane limitata.
Concetto di stabilità marginale:
I sistemi marginalmente stabili sono quelli in cui esistono poli semplici sull’asse immaginario, ma la risposta rimane limitata per input che non corrispondono a questi poli.
Questo concetto implica un approccio cauto, in cui i sistemi vengono analizzati in modo più approfondito prima di essere considerati stabili o instabili in base al loro caso d’uso specifico.
È una condizione al contorno che la matematica etichetta come instabile, ma dal punto di vista dell’utente potrebbe dipendere dall’applicazione.
Stabilità a input zero e variabili di stato
Passiamo ora al concetto di stabilità a input zero, sfruttando la conoscenza che abbiamo delle variabili di stato:
Il sistema autonomo lineare:
Consideriamo un sistema lineare autonomo: \[ \dot{x} = Ascia \]\[ x(0) = x_0 \]
Trasformata di Laplace e analisi del sistema:
Applicando la trasformata di Laplace, otteniamo: \[ sX(s) - x_0 = AX(s) \]
La riorganizzazione dà: \[ X(s) = (sI - A)^{-1}x_0 \]
Qui, $ X(s) $ rappresenta la trasformata di Laplace del vettore di stato $ x $ e $ A $ è una matrice di coefficienti costanti.
Trasformata inversa per l’analisi della stabilità:
Per analizzare la stabilità, ci concentriamo sulla trasformata inversa di Laplace di $ X(s) $, che coinvolge la matrice $ (sI - A)^{-1} $. Per ogni stato iniziale \(x_0\), vogliamo studiare come si comporta \(x(t)\).
Le radici di $ (s) $ sono gli autovalori di $ A $, che determinano la stabilità del sistema nel caso di input zero.
Concentriamoci ora sull’equazione caratteristica derivata dal modello delle variabili di stato del sistema. Questa equazione gioca un ruolo cruciale nella comprensione della dinamica del sistema:
Il modello delle variabili di stato:
Per una matrice $ n n $ $ A $, il determinante di $ sI - A $ risulta in un polinomio di ordine n-esimo, che caratterizza la dinamica del sistema.
Questo determinante viene anche chiamato equazione caratteristica quando derivato dal modello delle variabili di stato.
Comprendere le voci della matrice aggiunta
Matrice congiunta di $ sI - A $:
Quando si considera la matrice aggiunta di $ sI - A $, ogni voce è un polinomio di ordine $ n - 1 $.
Il cofattore di ciascun elemento della matrice contribuisce a queste voci polinomiali.
Stabilità e zeri dallo spazio degli stati
Analisi di stabilità:
La stabilità del sistema è determinata dalle radici dell’equazione caratteristica, $ (s) = (sI - A) $.
Gli zeri, che provengono dagli elementi aggiunti della matrice, non influiscono sulla stabilità. Pertanto, per l’analisi della stabilità con input zero, ci concentriamo solo sui poli (radici di $ (s) $).
Risposta e stabilità dello Stato:
Se le radici di $ (s) $ giacciono nel semipiano sinistro, il vettore di stato $ x(t) $ rimane limitato, indicando stabilità.
I poli semplici sull’asse immaginario portano a risposte limitate ma sono considerati marginalmente stabili.
Stabilità asintotica
Un sistema è asintoticamente stabile se tutte le radici di $ (s) $ si trovano nel semipiano sinistro, causando il decadimento a zero di tutte le variabili di stato come $ t $.
Nota che \(x_0\) è un fattore di scala (in modo simile agli zeri). La dinamica è guidata da \(\Delta(s)\).
Condizioni di stabilità, instabilità e stabilità marginale
Condizioni di stabilità:
Asintoticamente stabile: tutti i poli si trovano nel semipiano sinistro.
Instabile: Almeno un polo nel semipiano destro o più poli sull’asse immaginario.
Marginalmente stabile: tutti i poli nel semipiano sinistro, ad eccezione dei poli semplici sull’asse immaginario.
Stabilità marginale, commenti aggiuntivi
Si noti che nel caso marginalmente stabile, non stiamo abbinando i poli ora come facevamo prima. È una situazione diversa, \(x_0\) è una costante.
Un polo nell’origine dà una risposta costante, moltiplicata per la costante \(x_0\), il che significa che \(x(t)\) rimane limitato in una regione specifica.
Allo stesso modo per due poli immaginari. La risposta è oscillatoria, moltiplicata per la costante \(x_0\), il che significa che \(x(t)\) rimane confinato in una regione specifica.
Per questo motivo, qualsiasi polo semplice sull’asse immaginario fornisce una risposta in uno stato limitato, e questo può essere raggruppato nella condizione di stabilità marginale.
Relazione tra stabilità a input zero e stabilità BIBO
Equivalenza dei concetti di stabilità:
Se e solo se $(s)=(sI - A) $ è uguale al denominatore della funzione di trasferimento del sistema $ G(s) $, allora stabilità asintotica (stabilità con input zero ) e la stabilità BIBO sono le stesse.
In molti sistemi reali questa condizione è soddisfatta. Questa è chiamata condizione di controllabilità e osservabilità.
SIDEBAR - concetti di stabilità, concentrandosi in particolare su come la posizione dei poli influisce sulla stabilità di un sistema di controllo e sui casi specifici di poli semplici sull’asse immaginario, che portano alla stabilità marginale.
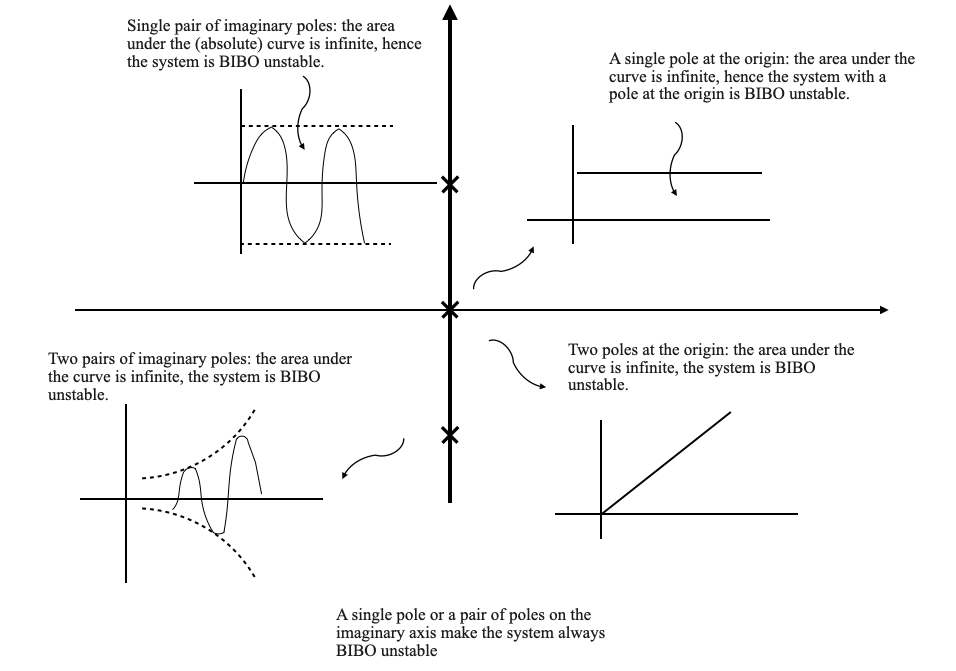
Poli sull’asse immaginario e risposta del sistema
Pali semplici sull’asse immaginario:
Un polo semplice sull’asse immaginario (esclusa l’origine) corrisponde ad una componente sinusoidale nella risposta del sistema.
Quando lo stato del sistema $ x(t) $ è influenzato da un semplice polo sull’asse immaginario, la risposta sarà oscillatoria. L’entità di questa oscillazione è influenzata dalla condizione iniziale $ x_0 $, ma la risposta rimane limitata: non cresce all’infinito né decade a zero.
Questo comportamento oscillatorio limitato caratterizza un sistema marginalmente stabile.
Polo all’Origine:
Un polo semplice all’origine del piano s corrisponde ad una componente costante nella risposta del sistema.
Ciò porta a un valore di stato stazionario che dipende dalla condizione iniziale $ x_0 $, risultando in una risposta limitata che non cambia nel tempo.
Classificazioni di stabilità basate sulla posizione dei poli
Stabilità asintotica:
Un sistema è asintoticamente stabile se tutti i poli si trovano nel semipiano sinistro. In questo caso, tutte le modalità del sistema decadono nel tempo, portando $ X(t) $ ad avvicinarsi allo zero mentre $ t $ tende all’infinito.
Sistemi instabili:
Se almeno un polo si trova nel semipiano destro, o se ci sono più poli sull’asse immaginario, il sistema è instabile. Questo perché tali posizioni polari portano a risposte che crescono illimitate nel tempo.
Stabilità marginale:
La stabilità marginale si verifica quando tutti i poli si trovano nel semipiano sinistro, ad eccezione dei poli semplici sull’asse immaginario. Questi sistemi non mostrano una crescita illimitata in risposta, né si stabilizzano su uno stato stazionario; invece, sostengono le oscillazioni.
Equivalenza tra stabilità asintotica e stabilità BIBO
Condizioni di equivalenza:
La stabilità asintotica (stabilità con input zero) e la stabilità BIBO (Bounded-Input, Bounded-Output) diventano equivalenti quando il determinante di $ sI - A $ corrisponde al denominatore della funzione di trasferimento del sistema $ G(s) $.
Questa condizione è spesso soddisfatta nei sistemi reali, rendendo in molti casi i concetti di stabilità a ingresso zero e stabilità BIBO praticamente sinonimi.
Nella teoria del controllo, questa equivalenza è legata ai concetti di controllabilità e osservabilità.
Termini di stabilità semplificati
Classificazione semplificata:
Date le comprensioni di cui sopra, possiamo semplificare la nostra terminologia:
Stabile: tutti i poli sono nel semipiano sinistro.
Instabile: almeno un polo si trova nel semipiano destro o più poli si trovano sull’asse immaginario.
Marginalmente stabile: tutti i poli sono nel semipiano sinistro ad eccezione dei poli semplici sull’asse immaginario.
Considerazioni conclusive
Comprendere queste sfumature di stabilità basate sulla posizione dei poli è fondamentale nella progettazione e nell’analisi del sistema di controllo. Aiuta a prevedere il comportamento del sistema in varie condizioni e a garantirne il funzionamento sicuro e affidabile. I sistemi marginalmente stabili, sebbene limitati, richiedono un’attenta considerazione a causa delle loro oscillazioni sostenute, che potrebbero essere indesiderabili in determinate applicazioni.
BARRA LATERALE - Matrice aggiunta
Per capire perché ogni elemento della matrice aggiunta di $ sI - A $ è un polinomio di ordine $ n - 1 $, è importante approfondire i concetti di matrici, determinanti e loro aggiunti nel contesto dell’algebra lineare e dei sistemi di controllo .
Concetti di base
Matrice aggiunta:
L’aggiunto (o adigato) di una matrice è formato dai cofattori di ciascun elemento della matrice.
Per una matrice quadrata $ A $, l’aggiunto è indicato come $ (A) $ ed è la trasposta della matrice dei cofattori di $ A $.
Cofattore di un elemento:
Il cofattore di un elemento in una matrice si calcola prendendo il determinante della sottomatrice formata eliminando la riga e la colonna di quell’elemento e quindi applicando un segno in base alla posizione dell’elemento.
Aggiunto di $ sI - A $
Consideriamo ora la matrice $ sI - A $ per una matrice $ n n $ $ A $ e una matrice scalare $ s $:
$ sI $ è una matrice diagonale con $ s $ sulla diagonale e zeri altrove.
$ sI - A $ risulta in una matrice in cui gli elementi diagonali sono $ s - a_{ii} $ (dove $ a_{ii} $ sono gli elementi diagonali di $ A $) e gli elementi fuori diagonale sono gli elementi negati di $ A $.
Ordine polinomiale negli elementi aggiunti
Ordine polinomiale nei cofattori:
Quando calcoliamo il cofattore di un elemento in $ sI - A $, prendiamo essenzialmente il determinante di una sottomatrice $ (n-1) (n-1) $.
Questo determinante sarà un polinomio in $ s $ poiché ogni operazione sul determinante introduce una somma di prodotti di elementi della matrice, che sono lineari in $ s $ dovuti agli elementi diagonali di $ sI - A $.
Ordine del polinomio:
Poiché il determinante di una matrice $ (n-1) (n-1) $ coinvolge una somma di prodotti di $ (n-1) $ elementi, il polinomio risultante in $ s $ sarà dell’ordine $ n - 1$.
Pertanto ogni cofattore della matrice aggiunta, e quindi ogni elemento di $ (sI - A) $, è un polinomio di ordine $ n - 1 $.
Conclusione
In sintesi, l’aggiunto di $ sI - A $ è costituito da elementi che sono polinomi di ordine $ n - 1 $ perché ogni elemento è derivato dal determinante di una sottomatrice $ (n-1) (n-1) $, che risulta intrinsecamente in un polinomio di $ s $ di ordine $ n - 1 $. Questa comprensione è cruciale nei sistemi di controllo, in particolare quando si analizza la stabilità del sistema attraverso la sua rappresentazione nello spazio degli stati.